瑕疵檢測、污垢檢測或芯片檢測都是非常典型的機器視覺系統檢測的應用方式。根據工件和生產線的狀況不同,每種檢測都需要不同的功能。本文對機器視覺污點檢測工具的原理及使用方法做以簡介。
1、區段
視覺系統透過CCD圖像傳感器將強度資料的變化檢測為污點或邊緣。但是,逐個處理像素需要花費大量的時間,并且噪聲會對檢測結果產生影響。因此,視覺系統使用由數個像素組成的小區域的平均強度,該小區域被稱為“區段”,并透過比較這些區段的平均強度來檢測污點。
 如上圖中所示將區段(4 x 4 像素)的平均強度與周邊地區的平均強度作比較,圖中的紅色區段被檢測出污點。
如上圖中所示將區段(4 x 4 像素)的平均強度與周邊地區的平均強度作比較,圖中的紅色區段被檢測出污點。
2、污點檢測工具的算法(區段的比較和計算方式)
檢測原理:
(1)將 X 方向指定為檢測方向時:
污點檢測工具測量指定區域(區段)的平均強度,并以四分之一個區段為間距改變區段位置。
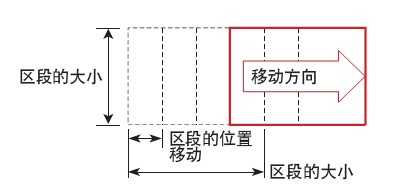 它可確定四個區段中的最大和最小強度之間的差值,其中包括標準區段(下圖中的①95)。該差值被視為標準區段的污點等級。
它可確定四個區段中的最大和最小強度之間的差值,其中包括標準區段(下圖中的①95)。該差值被視為標準區段的污點等級。
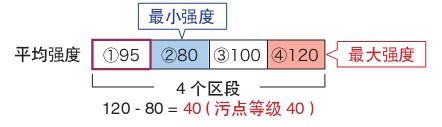 當污點等級超過當前閾值時,標準區段被視為污點。被測區域中超過預設閾值的次數被稱為“污點范圍”。該過程反復進行,從而不斷改變標準區段在被測區域中的位置。
當污點等級超過當前閾值時,標準區段被視為污點。被測區域中超過預設閾值的次數被稱為“污點范圍”。該過程反復進行,從而不斷改變標準區段在被測區域中的位置。
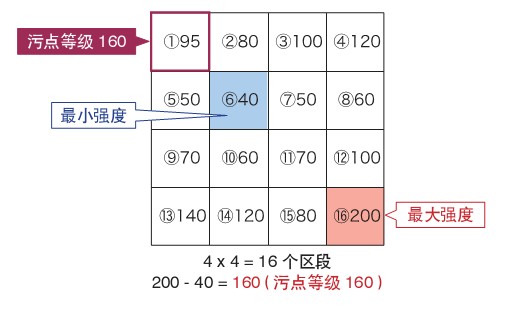
 (2)將 X 和 Y 方向指定為檢測方向時
(2)將 X 和 Y 方向指定為檢測方向時
以標準區段為參照物,計算 X 和 Y 方向上的16個區段的最大強度和最小強度的差值。通過比較全部 16 個區段,而不僅僅只是 X 方向上的 4 個區段,可檢測更細微的強度變化(污點)。
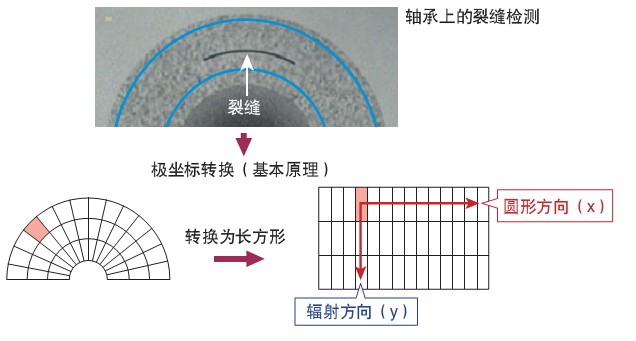
 在圓形工件上檢測污點的原理
在圓形工件上檢測污點的原理
1、區段
視覺系統透過CCD圖像傳感器將強度資料的變化檢測為污點或邊緣。但是,逐個處理像素需要花費大量的時間,并且噪聲會對檢測結果產生影響。因此,視覺系統使用由數個像素組成的小區域的平均強度,該小區域被稱為“區段”,并透過比較這些區段的平均強度來檢測污點。
2、污點檢測工具的算法(區段的比較和計算方式)
檢測原理:
(1)將 X 方向指定為檢測方向時:
污點檢測工具測量指定區域(區段)的平均強度,并以四分之一個區段為間距改變區段位置。
以標準區段為參照物,計算 X 和 Y 方向上的16個區段的最大強度和最小強度的差值。通過比較全部 16 個區段,而不僅僅只是 X 方向上的 4 個區段,可檢測更細微的強度變化(污點)。
PET 瓶、軸承或O型圈等多種圓形工件需要對圓形區域進行視覺檢測。當搜索圓形區域時,程序同時執行極坐標轉換。為了檢測污點,它將圓形窗口(檢測區段)轉換為長方形,并在圓形方向和半徑方向上比較區段的強度。